
تصميم وتنفيذ نظام قيادة ذاتية لسيارة مع تجنب الاصطدام بالعوائق
المؤلفون: د. عبد القادر جوخدار – د. حازم عيسى – يمان روّاس قلعه جي
جامعة حلب، كلية الهندسة الكهربائية والإلكترونية، سورية
ترجمة من اللغة الإنكليزية لورقة البحث المنشورة في مجلة Cogent Engineering في المملكة المتحدة.
يمكن تصفح النسخة الأصلية من الرابط التالي:
https://doi.org/10.1080/23311916.2018.1485458
الملخص
تقوم هذه الورقة البحثية بدراسة عملية تصميم وتصنيع نظام روبوتي منخفض التكلفة بمكوناته العتادية والبرمجية يمكن أن يتم تركيبه على أي سيارة تعمل بالوقود وذات علبة سرعة أوتوماتيكية مما يعطيها إمكانية قيادة نفسها بدون وجود سائق وبشكل ذاتي. يتكون النظام المقترح من ثلاثة أنظمة أساسية؛ أولاً، نظام رؤية حاسوبي يقوم بالتقاط الخط المنصف للطريق ومن ثم حساب زاوية مرجعية لتحريك عجلة قيادة السيارة وفقاً لذلك. ثانياً، من أجل اتخاذ القرار المناسب، يقوم نظام التحكم وتجنب الاصطدام بجمع المعطيات من الحساسات ومن ثم إعطاء القرار المناسب عبر الاعتماد على مبدأ التحكم وفق الحلقة المغلقة. ثالثاً، النظام الالكتروني-الميكانيكي؛ والذي يتحكم بشكل فيزيائي بكلٍ من عجلة القيادة والمكابح والتسارع عبر محركات ذات أنواع متعددة. تم اختبار النظام المقترح من خلال عدة تجارب حقيقية على أرض الواقع وقد عاد بنتائج مقبولة.
المواضيع المتعلقة
النظم الكهروميكانيكية المصغرة، الأنظمة وهندسة التحكم، هندسة النظم، الأنظمة الذكية.
الكلمات المفتاحية
السيارات ذاتية القيادة، تجنب العوائق، الكبح التلقائي، الرؤية الحاسوبية، التحكم اللاسلكي.
ماهي الأهمية العامة لهذا البحث؟
تأخذ السيارات ذاتية القيادة أهمية متزايدة في الوقت الحالي وستلعب دوراً مهماً في المستقبل. ما قمنا بمحاولة عمله في هذا البحث هو تصميم عتاد منخفض التكلفة يمكن تركيبه على أي سيارة مما يحولها إلى سيارة ذاتية القيادة. تسهل هذه الخطوة عمل الباحثين حول العام لدفع أبحاثهم وتطويرها دون الوقوع بمشكلة ارتفاع التكلفة، حيث قمنا باستخدام محركات غير معقدة لتدوير عجلة القيادة وكذلك ضغط المكابح ودواسة الوقود. يقوم كذلك جهاز الكومبيوتر بأخذ البيانات من الحساسات والكاميرات وتحليلها والتعرف على البيئة المحيطة حتى يقوم بقيادة السيارة بشكل ذاتي، كما يقوم بتفادي الاصطدام بالعوائق ويمتلك الإمكانية لتتبع مسار محدد مسبقاً.
1. مقدمة
كانت التكلفة ولازالت عائقاً لتحويل فكرة السيارات ذاتية القيادة من الدراسة النظرية إلى التطبيق العملي على أرض الواقع، حيث تعاني هذه التقنية من كونها محصورة بشريحة محدودة من المستهلكين بسبب سعرها العالي، وهذا مايمنع في الحقيقة تطور أنظمة النقل وانتقالها للمرحلة القادمة في المستقبل. ورغم مشكلة التكلفة السابقة، تم تطوير عدة حلول لسيارات ذاتية القيادة وطرحها تجارياً كسيارة غوغل [1] و سيارة تسلا [2] وغيرها من الشركات التجارية التي اعتمدت على تصميم سيارات ذاتية القيادة عالية التقنية من الصفر. لكن بهذه الحالة يجب أن نسأل سؤالاً مهماً؛ ماذا عن السيارات القديمة ذات التقنية المنخفضة؟
إن نسبة كبيرة من السيارات في الوقت الحالي تعتبر قديمة بالفعل [3]، ولذلك يمكن أن يكون الحل بالتركيز على تطوير وتحسين هذه السيارات بدلاً عن استبدالها بسيارات حديثة ذات تقنية عالية وتكلفة كبيرة. يسمح الاعتماد على هذه المنهجية بالوصول لحلول مناسبة من حيث التكلفة، وهذا ما يؤدي لاستمرار تطور أنظمة النقل البشرية خارج الحدود التي وضعتها القيود الاقتصادية. بُذلت جهوداً كبيرة بهذا الصدد في المجتمع الأكاديمي، على سبيل المثال قام الباحثون في [7] بالتحكم بالمركبة عبر الوصول لإشاراتها الداخلية وتعديلها. أما في كل من [4] و [9] و [10] و كذلك [17] فقام الباحثون باختيار منهج مختلف تماماً وذلك عبر تصميم روبوت ذي شكل بشري يقوم بالجلوس مكان السائق وقيادة المركبة. بالرغم من أن هذه الطرق لا تتطلب تعديلاً دائماً على المركبات، لكنها معقدة بشكل كبير وصعبة التصنيع. وكمحاولة لحل هذه المشكلة، قام الباحثون في [13] و [11] باقتراح منهجية مختلفة عبر تصميم روبوت يقود المركبة لكنه ليس بالضرورة أن يكون مشابهاً للشكل البشري. لم تكن تفاصيل تصميم هذا الروبوت واضحة في [13]، لكن تعقيد التصميم في [11] كان كبيراً مما أدى إلى استهلاك وقت كبير في عملية تجميع وتركيب هذا الروبوت، فقد ذكر الباحثون أن عملية التركيب أخذت حتى 4 ساعات. وكحل لمشكلة التعقيد هذه، وصل الباحثون في [8] إلى تصميم أكثر بساطة، لكن نظام تحريك عجلة القيادة لديهم لم يكن متيناً.
أما على الجانب التجاري، فقد تم إنتاج عدة روبوتات قائدة للمركبات، على سبيل المثال، قام كل من Stahle [12] و Kairos [6] بإنتاج نظام متين وموثوق لقيادة المركبات، لكن هذه المنتجات كانت معقدة وعالية السعر بشكل كبير.
تشغل الروبوتات القائدة للمركبات حيزاً هاماً في الجانب الأكاديمي والصناعي، وذلك لأن الاعتماد على هذه الروبوتات يحمي من التعديل الدائم للوظائف الداخلية للمركبات وكذلك يسمح بتطبيق حلول أكثر ديناميكية على أرض الواقع. نتيجةً للنقاط السابقة، يمكننا تلخيص النجاح الذي وصلت إليه ورقتنا البحثية من خلال تصميم نظام قيادة ذاتي للمركبات وفق ثلاثة معايير أساسية؛ أولاً، سهولة التطبيق وعدم الحاجة لتنفيذ تعديلات دائمة على الوظائف الداخلية للسيارة. ثانياً، سهولة التصنيع و انخفاض مستوى التعقيد. وأخيراً؛ التكلفة المنخفضة.
تم تقسيم الورقة البحثية كما يلي؛ القسم 2 يشرح النظام المطوّر وأقسامه المختلفة، القسم 3 يشرح بشكل مفصل النظام الميكانيكي، أما القسم 4 فيركز على نمذجة نظام التوجيه ومقدرات القيادة الذاتية. كما تشرح الأقسام 5 و 6 على التوالي نظامي المكابح والتسارع. أما القسم 7 فيحوي ملخصاً عن التجارب المنفذة ونتائجها. وأخيراً؛ تم مناقشة النتائج والأعمال المستقبلية في القسم 8.
2. نظرة عامة حول تصميم النظام
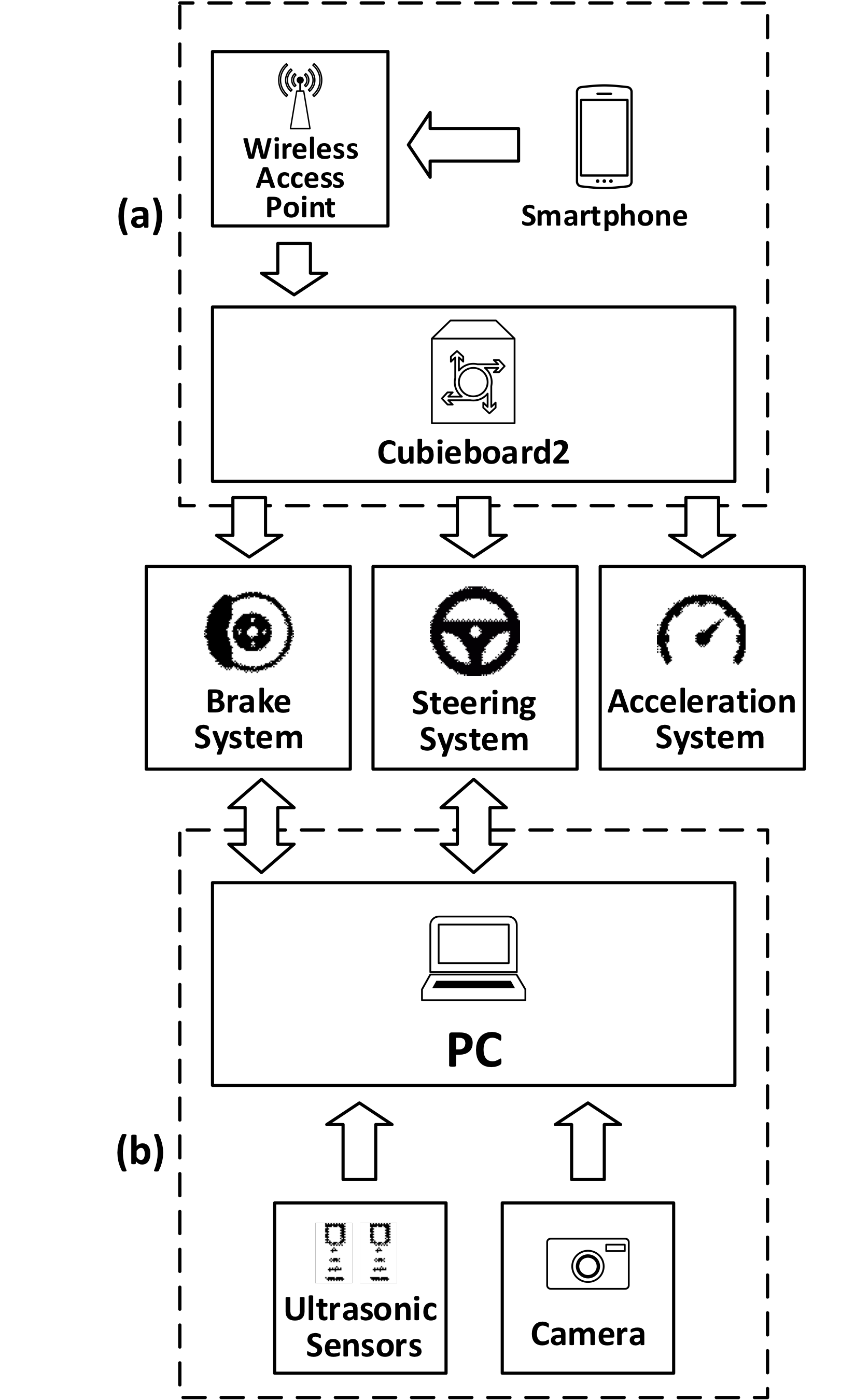
يُوفّر النظام الروبوتي المقترح نوعين من أنماط العمل. النمط الأول هو نمط التحكم عن بعد، حيث يتم استخدامه عند الرغبة بالتحكم بالسيارة لاسلكياً؛ وذلك عبر استخدام تطبيق Android الذي يقوم بإرسال إشارات التحكم عبر بروتوكول UDP إلى الكومبيوتر المصغر CubieBoard 2 الموجود داخل السيارة. يتصل كل من التطبيق والكومبيوتر المصغر عبر WIFI من خلال نقطة وصول لاسلكية (Wireless Access Point) موجودة أيضاً ضمن السيارة، حيث يستقبل الكومبيوتر المصغر CubieBoard 2 إشارات التحكم عبر بروتوكول UDP ويرسل أمر التحكم المناسب إلى الوحدات الطرفية عبر أقطاب GPIO، مما يسمح بالتحكم بشكل كامل بعجلة قيادة السيارة ودواسة الوقود والمكابح. (انظر الشكل 1-a).
أما النمط الثاني فهو نمط القيادة الذاتية، والذي يعطي الإمكانية الكاملة للسيارة باتباع مسار محدد مسبقاً وتجنب الاصطدام بالعوائق دون تدخل بشري. تقوم الكاميرا المثبتة على المصد الأمامي للسيارة بإرسال تغذية مستمرة من الصور إلى جهاز الحاسب الموجود في المركبة، حيث تقوم برمجية الرؤية الحاسوبية بالتعرف على الخط المنصف للطريق ومن ثم حساب درجة الانحراف (مقدار الخطأ) وترسل الأمر المناسب إلى نظام التوجيه والتحكم بعجلة القيادة. كما تقوم الحساسات ذات الأمواج فوق الصوتية المتوضعة على المصد الأمامي أيضاً بفحص المنطقة الأمامية المباشرة للسيارة، وفي حال وجود أي عائق تقوم بإرسال أمر التوقف إلى المكابح لإيقاف السيارة ومنعها من الاصطدام. (انظر الشكل 1-b).
يجب التنويه إلى أنه تم أخذ بعض الافتراضات بعين الاعتبار لتبسيط ظروف العمل بدون التأثير على سلامة المنهجية المقترحة:
- محرك السيارة في وضعية التشغيل، وعلبة السرعة الأوتوماتيكية موضوعة على وضع القيادة (D).
- بسبب المساحة المحدودة للساحة المخصصة للتجارب، لم تكن هناك حاجة عملية لزيادة تسارع السيارة. لذلك فإن التحكم بدواسة الوقود هو متوفر فقط في نمط التحكم عن بعد. أما في نمط القيادة الذاتية فتسير السيارة بسرعة المحرك الاعتيادية (Idle speed).
3. التصميم الميكانيكي
يعتمد مبدأ التحكم بعجلة القيادة على تثبيت مسنن كبير حول عجلة القيادة يعشّق معه مسنن أصغر حجماً من الأسفل (الشكل 2) وهذا يسمح بتحقيق نسبة نقل حركة من رتبة 1:7، حيث يقوم محرك خطوي متصل بالمسنن الصغير بتوليد عزم كافي لتدوير عجلة القيادة بكلا الاتجاهين.

أُجريت عدة عمليات محاكاة باستخدام برنامج Solid Works قبل تصنيع المسننين، حيث تم اختيار المسننات من النوع المهمازي (المسنن موازٍ للمحور) وذلك لسببين؛ (١) محور المحرك الخطوي وعجلة القيادة هما متوازيان (٢) كلا المسننين موجودان ضمن مستوٍ واحد.
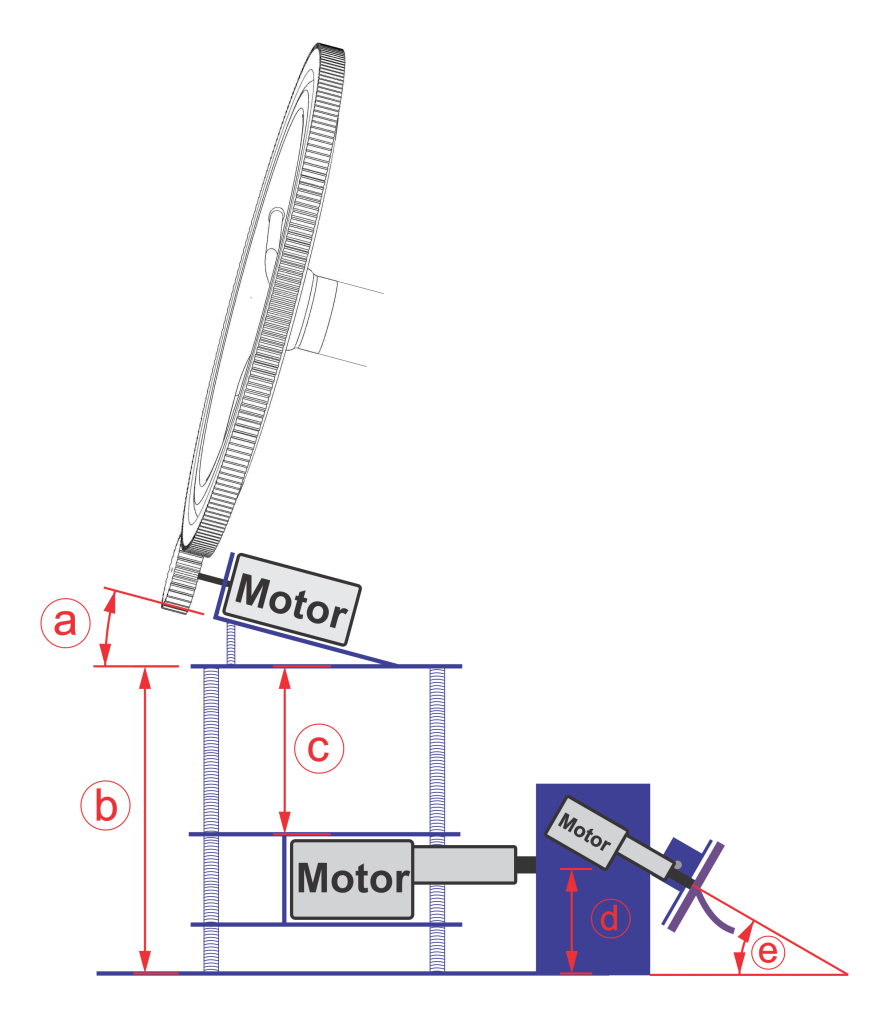
تم تثبيت كل الأجزاء الميكانيكية للنظام على القاعدة الرئيسية؛ وهي جزء أساسي يقوم بحمل تلك الأجزاء وتثبيتها من أجل السماح لها بالحركة دون أي انزلاقات أو انزياحات أثناء العمل، كما يسمح لها بالتوضع بشكل حر وفقاً للقياسات المختلفة لأنواع السيارات. يوضح الشكل 3 حامل محرك عجلة القيادة، حيث توفر له القاعدة زاوية حرة مع ارتفاع ديناميكي قابل للتغيير حسب الحاجة (a و b في الشكل 3)، أما حامل محرك المكابح فقد تم تصميمه ليتحمل قوة الضغط الناتجة عن المكابح الهيدروليكية للسيارة وتسمح له القاعدة بتغيير ارتفاعه حسب الحاجة كما هو موضح في c على الشكل 3. وأخيراً، يوضح الجزءان d و e في الشكل 3 كيفية عمل حامل محرك دواسة الوقود، حيث تم تثبيته باستخدام مبدأ أبسط من سابقه بسبب عدم وجود قوة ضغط كبيرة مقارنةً مع محرك المكابح.
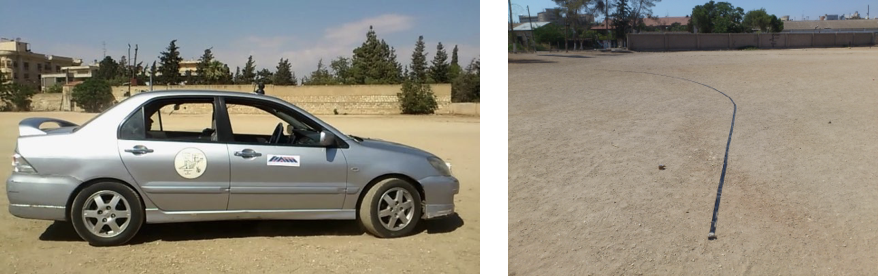
يوضح الشكل 4 النظام الميكانيكي المطبق كاملاً أثناء عمله على سيارة من نوع Mitsubishi Lancer 2006.

4. نظام التوجيه
1.4. نمذجة نظام التوجيه
إن نمذجة نظام التوجيه هي خطوة هامة من أجل التحقق من صحة عمل نظام التحكم، وكذلك من أجل إيجاد العلاقة الحقيقية مابين عجلة القيادة وعجلات السيارة كما هو موضح بالشكل 5.
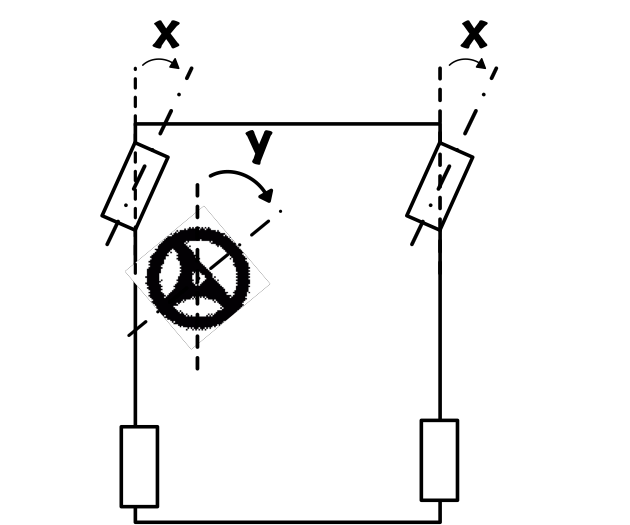
حيث تم جمع بيانات رقمية حول الحركة الزاوية لكل من العجلتين الأماميتين للسيارة وعجلة القيادة، وذلك من خلال تثبيت حساس جاذبية أرضية على كلٍ منهما، حيث تم افتراض نقطة البداية عند دوران عجلة القيادة من أقصى اليسار فأعطى ذلك ثلاث دورات متتالية موضحة بكل من الأشكال 6 و 7 و 8 تباعاً.
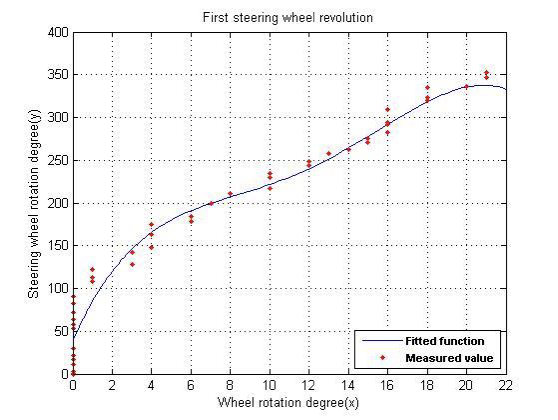
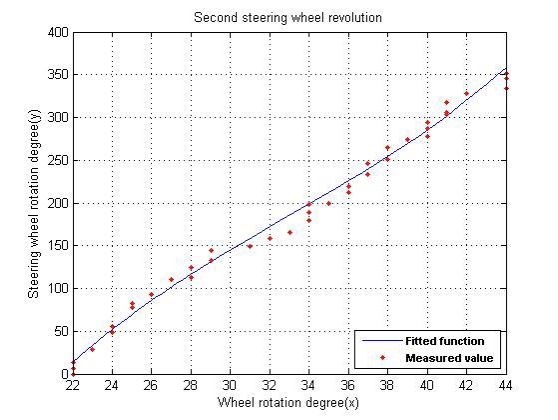
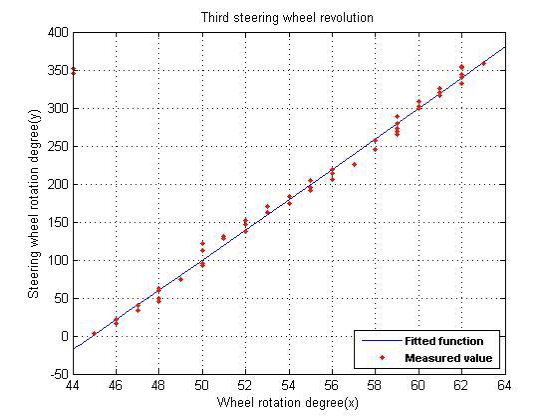
تم استخدام البيانات السابقة في عملية استيفاء رياضية لاستنتاج كثير الحدود المطلوب؛ لكن النتائج أظهرت عدم خطية واضحة في العلاقة الزاوية بين حركة العجلات الأمامية وعجلة القيادة للسيارة، وهذا يعود لاعتمادها على مبدأ Ackermann.
معادلات كثيرات الحدود المستنتجة باستخدام برنامج Matlab:

2.4. التعرف على المسار
اعتمدت بعض الأبحاث السابقة على الحساسات ذات الأشعة تحت الحمراء من أجل التعرف على المسار [5]، لكن النظام المقترح في هذا البحث يتطلب العمل بشكل صحيح في البيئة الخارجية وهذا قد يعني التعرض للغبار وأشعة الشمس وغيرها من المؤثرات الجوية. بالإضافة للنقاط السابقة، يجب أخذ عامل آخر بعين الاعتبار وهو لون ونوع التربة التي تسير عليها السيارة، حيث كانت الساحة المخصصة للتجارب أثناء العمل في هذا البحث مليئة بالغبار والرمل، ولهذا السبب كان يجب على نظام الرؤية الحاسوبية أن يكون ذا جودة عالية من أجل منع حصول أي خلل أثناء التجارب العملية. تم وضع خط منصف أسود اللون في الساحة أثناء التجربة العملية، حيث قام نظام الرؤية الحاسوبية بالتقاط هذا الخط والتعرف عليه ومن ثم تنفيذ خوارزميات حساب الخطأ والانحراف ليتم تصحيح مسار السيارة وفقاً لذلك.
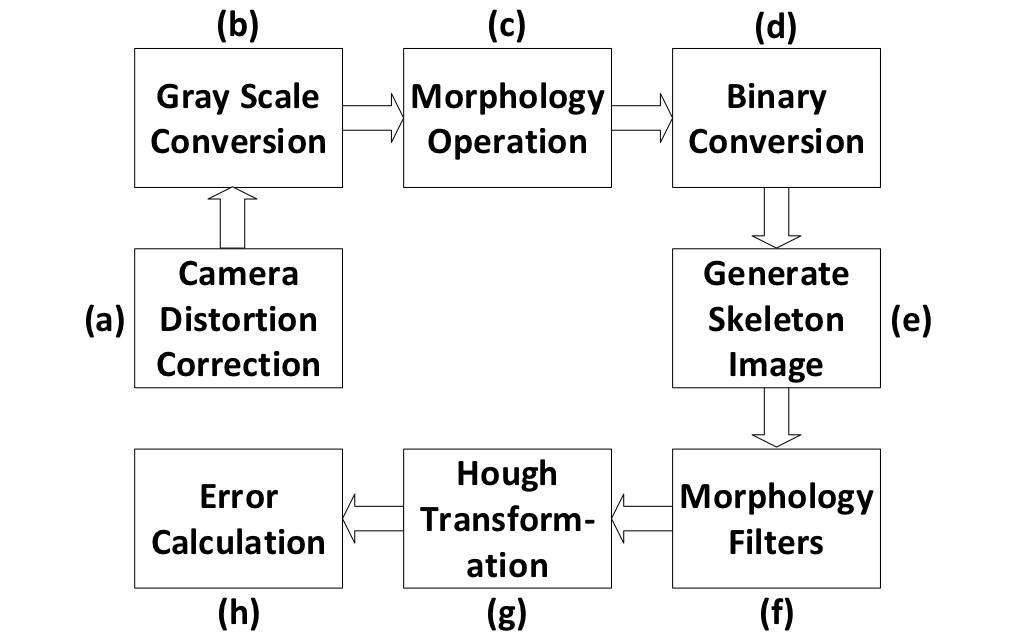
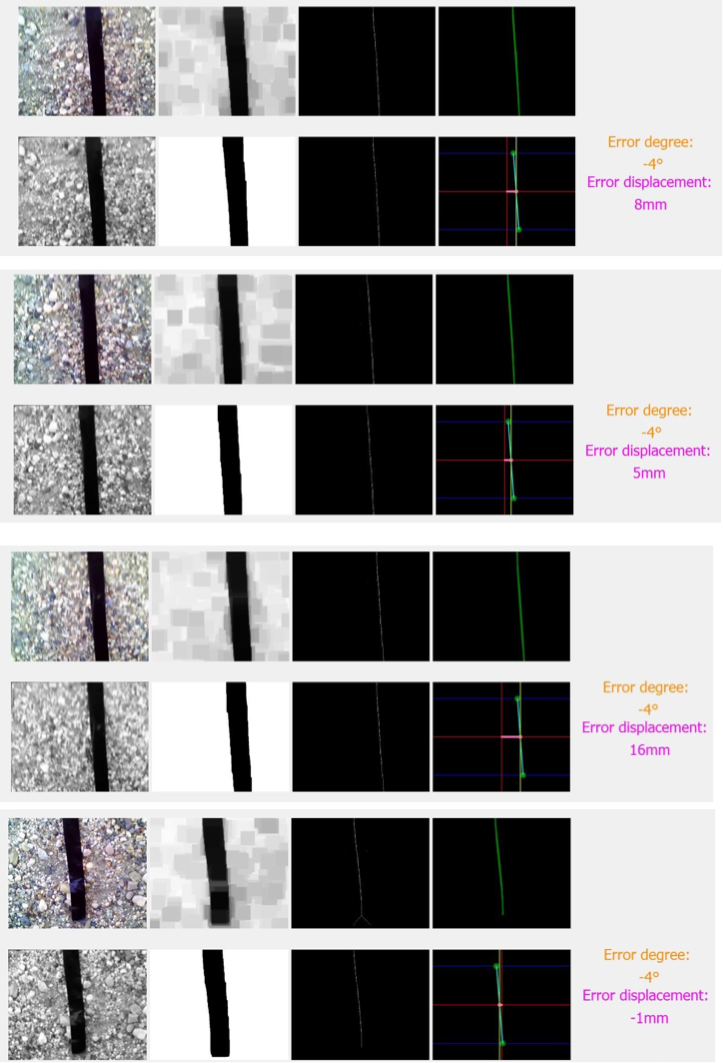
يوضح الشكل 9 منهجية الخوارزمية المطورة للتعرف على الخط المنصف؛ في البداية، يتم إجراء عملية معايرة بهدف إزالة الانحناءات والتشوهات الناتجة عن عدسة الكاميرا مما يسمح بأخذ قياسات ذات دقة أعلى. يتم بعد ذلك تحويل الصورة إلى التدرج الرمادي وثم تطبيق عمليات مورفولوجية من أجل التخلص من الخلفية الترابية وتخفيف التفاصيل غير الهامة التي قد تظهر ضمن الصورة. لاحقاً، وبعد التحويل إلى نظام الألوان الثنائي، يتم تطبيق التحويل الهيكلي ويليه سلسلة من المرشحات المورفولوجية التي تقوم بترشيح أي ضجيج موجود ضمن الصورة الناتجة. في النهاية، يتم تطبيق تحويل Hough الذي يتعرف على الخطوط المستقيمة الموجودة ضمن الصورة مما يسمح باستخدامها في عملية حساب مسافة وزاوية الانزياح عن الخط المنصف.
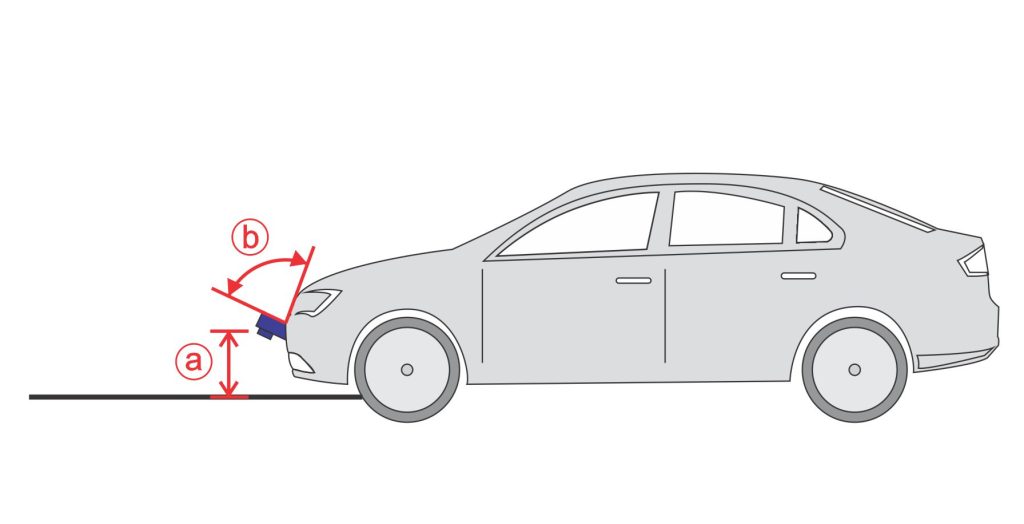
تم تطبيق الخوارزمية المقترحة باستخدام مكتبة OpenCV ولغة برمجة C#، حيث تم استخدام كاميرا بدقة 640×480 بكسل وبمعدل 30 إطار في الثانية الواحدة. تم تثبيت الكاميرا على المصد الأمامي للسيارة وذلك من أجل التعرف على الخط المنصف بأقل خطأ ممكن، وذلك على ارتفاع 35 سم فوق سطح الأرض (a على الشكل 10) وبزاوية 60° كما هو موضح في b على الشكل 10.
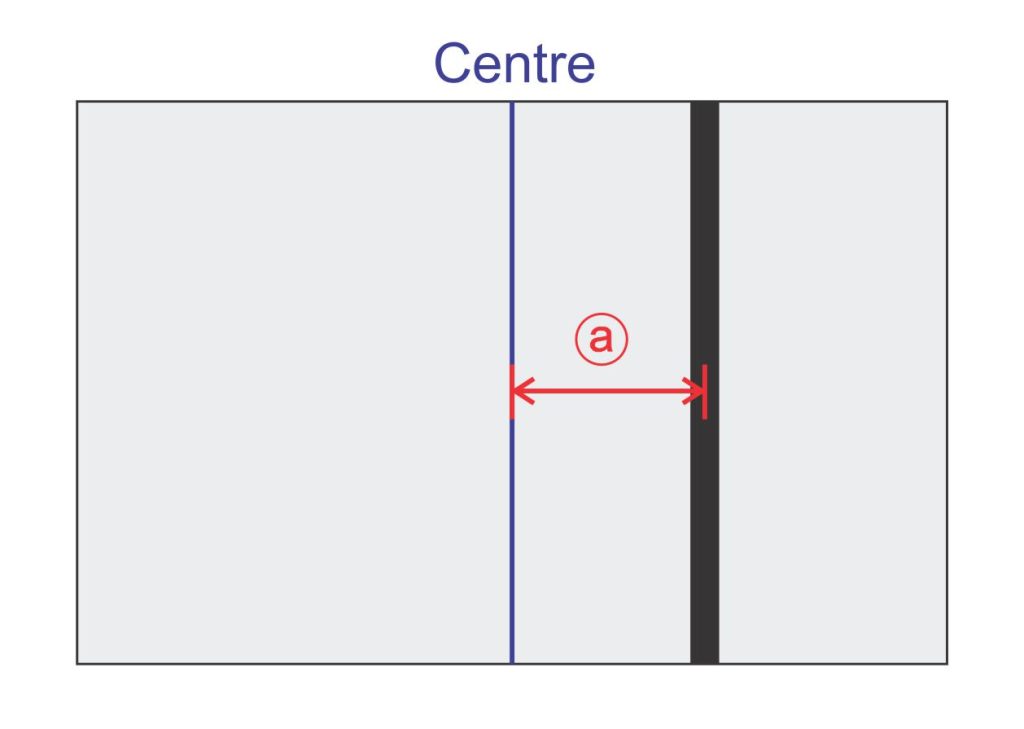
تم توجيه الكاميرا نحو الخط المنصف بشكل مباشر، وهذا يسمح بالتقاط الجزء المطلوب من المنصف ليتم حساب خطأ الانزياح. يوضح الشكل 11 طريقة قياس خطأ الانزياح (يوضح بالرمز a على الشكل نفسه).
3.4. التصميم الإلكتروني والكهربائي لنظام التوجيه
كان المحرك الخطوي من النوع الهجين مناسباً للاستخدام في هذا النظام بسبب سهولة التحكم به ودقته العالية، ولذلك تم اختيار محرك Sanmotion 103H7128-5810 من شركة SANYO-DENKI لتحريك عجلة القيادة. يتميز هذا المحرك بعزم مقداره 2 نيوتن/متر وبتيار 3 أمبير، كما تم اعتماد المتحكم المصغر Atmel 8-bit في تصميم دارة القيادة لهذا المحرك، والتي تقوم باستخدام تقنية تعديل عرض النبضة (PWM) للتحكم بسرعة وعزم المحرك.
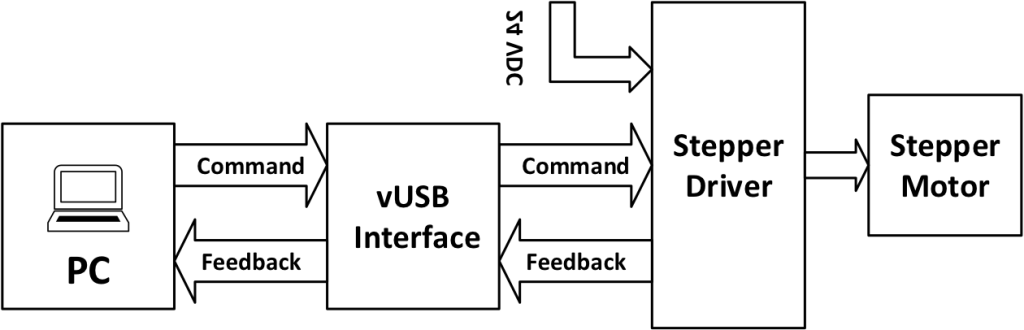
أما بالنسبة لواجهة الاتصال بين الكومبيوتر ودارة قيادة المحرك، فتم استخدام مكتبة vUSB [15] و متحكم مصغر من نوع Atmel 8-bit. تجدر الإشارة إلى أن استخدام التقنيات السابقة التي تُعتبر منخفضة التكلفة يساعد على الحفاظ على معيار التكلفة المنخفضة أثناء تصميم النظام المقترح. يوضح الشكل 12 المخطط الصندوقي لنظام التوجيه، حيث يقوم الكومبيوتر بإرسال الأوامر المطلوبة لدارة قيادة المحرك ومن ثم يحصل على تغذية راجعة بالوقت الحقيقي والتي تعبر عن حالة الملفات النحاسية للمحرك عبر واجهة vUSB من أجل استنتاج مقدار الحركة الزاوية في كل لحظة.
4.4. منهجية التحكم المعتمدة في نظام التوجيه
إن تحديد طريقة تدفق المعطيات بين الأنظمة الفرعية لنظام التوجيه هو أمر هام قبل تحديد منهجية التحكم المطلوبة. يوضح الشكل 13 الطريقة المعتمدة لتصحيح زاوية الخطأ في نظام التحكم بعجلة القيادة؛ في البداية، تقوم برمجية التعرف على الخط المنصف بحساب زاوية الخطأ للعجلات الأمامية للسيارة، ويلي ذلك استنتاج الزاوية المطلوبة لتحريك عجلة القيادة وفقاً للمنهجية الموضحة سابقاً في القسم 4.1 (انظر الشكل 13-a). يتم بعد ذلك الاستفادة من العلاقة بين دوران عجلة القيادة والمحرك من خلال نسبة نقل الحركة للمسننين الموضحة سابقاً في القسم 3 (انظر الشكل 13-b). وأخيراً، يتم حساب عدد خطوات المحرك المطلوبة حسب مواصفات المحرك المحدد (انظر الشكل 13-c).

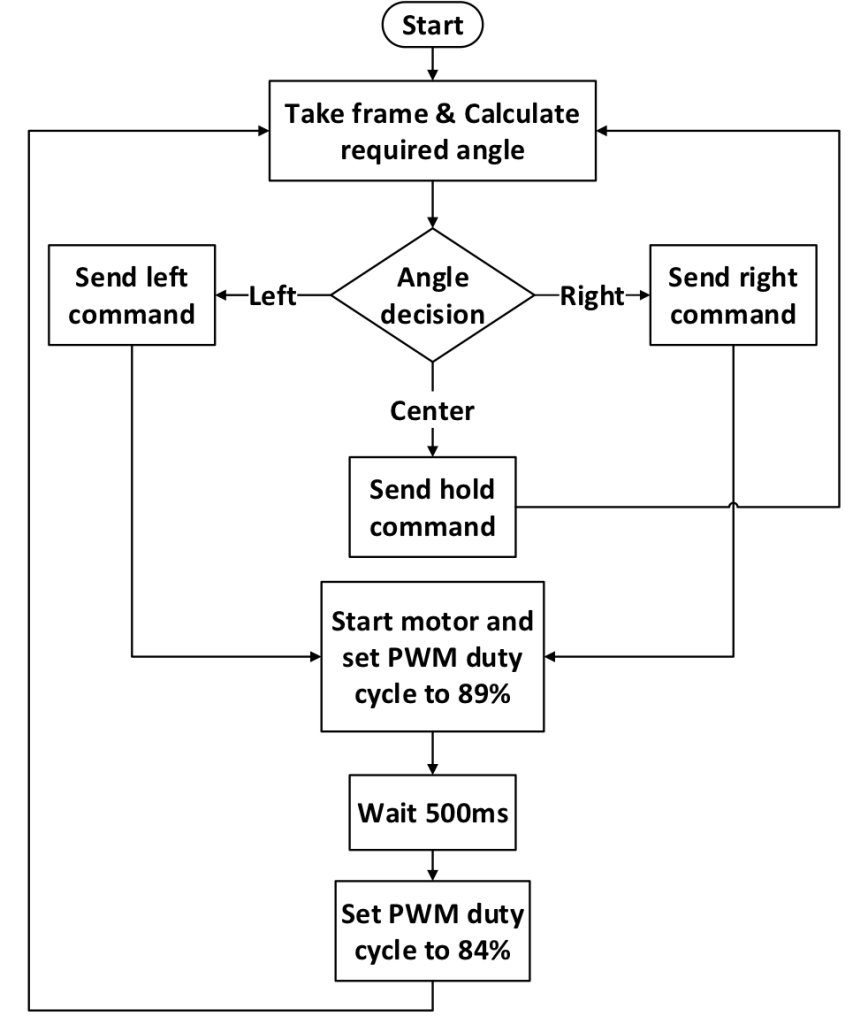
يوضح الشكل 14 المنطق المتبع في نظام التوجيه، حيث فشل النظام أثناء التجارب العملية بالاستجابة في بعض الأحيان بسبب العزم الكبير المطلوب لتحريك عجلة قيادة السيارة من وضعية السكون. ولحل هذه المشكلة، تم إعادة تصميم دارة قيادة المحرك لتعطي عزماً ابتدائياً إضافياً للتغلب على عزم العطالة الذي يسببه التسارع الابتدائي لعجلة القيادة، حيث تم زيادة دورة العمل (Duty cycle) في تقنية تعديل عرض النبضة (PWM) بمقدار 5٪ عند الانتقال من وضعية السكون إلى وضعية التحريك كما هو موضح في الشكل 14.
5. نظام المكابح وتجنب الاصطدام بالعوائق
1.5. اكتشاف العوائق
تم وضع حساسين للأمواج فوق الصوتية على المصد الأمامي للسيارة (انظر الشكل 15)، حيث يمكن لهذين الحساسين مسح المنطقة الأمامية المباشرة للسيارة واكتشاف أي عوائق ضمن مسافة 3.5 متر.

تم تصميم دارة مخصصة تعتمد على متحكم مصغر من نوع Atmel 8-bit من أجل القيام بالعمليات الحسابية لصدى الأمواج فوق الصوتية ومسافة العوائق التي قد توجد أمام السيارة. في حال وجود أي عائق، يتم إرسال إشارة عبر واجهة vUSB إلى الكومبيوتر الموجود في السيارة والذي يقوم بدوره بإرسال أمر التوقف للمكابح لإيقاف السيارة. (انظر الشكل 16).

2.5. التصميم الإلكتروني والكهربائي لنظام المكابح
تم اختيار محرك من النوع الخطي ليكون على تماس مع المكابح الهيدروليكية للسيارة والتي تحتاج إلى قوة ضغط كبيرة في أغلب أنواع السيارات الحالية. بوضع هذا المتطلب بعين الاعتبار، تم اختيار المحرك Linak LA31 لهذا الغرض، حيث يتميز بقوة دفع تصل إلى 6000 نيوتن وبتيار 0.5 أمبير. أما بالنسبة لدارة قيادة المحرك، فتم تصميمها بالاعتماد على متحكم مصغر من نوع Atmel 8-bit. يوضح الشكل 17 طريقة تنفيذ نظام المكابح المقترح.

3.5. منهجية التحكم المتبعة في نظام تجنب الاصطدام بالعوائق
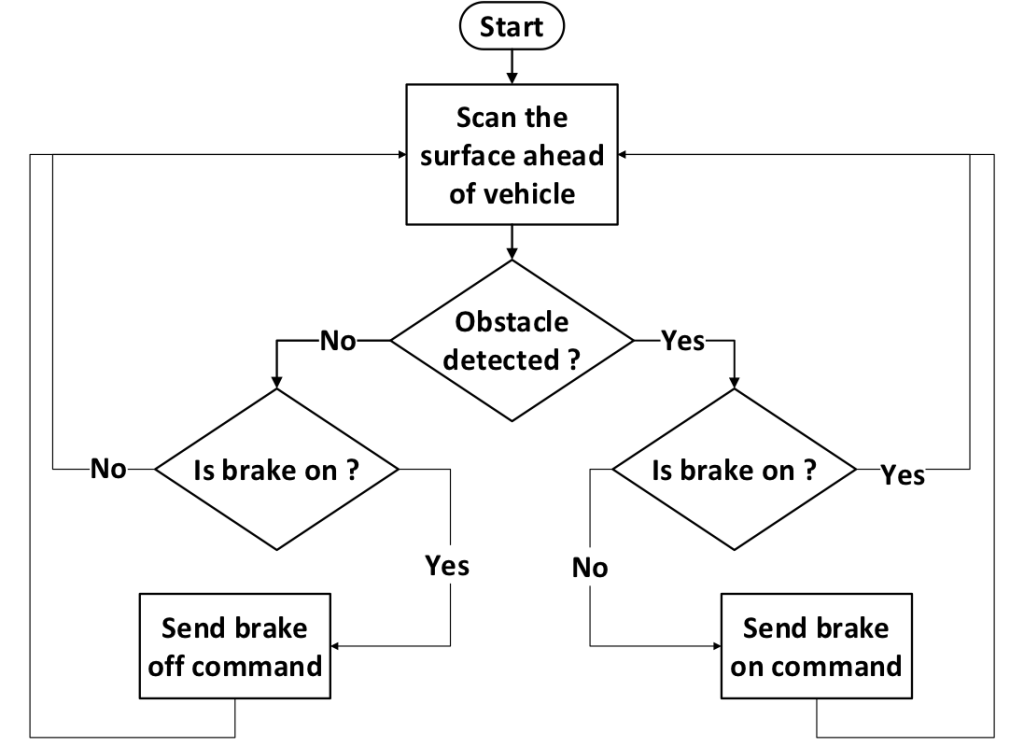
تم اتباع منهجية بسيطة في نظام تجنب الاصطدام بالعوائق، حيث تقوم الحساسات ذات الأمواج فوق الصوتية بمسح المنطقة الأمامية للسيارة وعند وجود أي عائق يتم إرسال أمر لتشغيل محرك المكابح بشكل مباشر. يشرح الشكل 18 المخطط التدفقي لهذا النظام.
6. نظام التسارع
يتم التحكم بتسارع السيارة في وضع القيادة عن بعد فقط، وذلك باستخدام محرك ذو وضعيتين (دفع – سحب)، حيث تم اختيار محرك Eagle Master CL-500 لهذا الغرض والذي يعطي تحكم بتسارع السيارة بسرعة واحدة فقط.
7. التجارب العملية والنتائج
كانت التكلفة الكلية لتطبيق النظام المقترح هي $510، أما وقت تجميع وتركيب النظام فلا يتجاوز 80 دقيقة. تم تصميم وتصنيع كافة الدارات والأجزاء الميكانيكية من الصفر محلياً لتحقيق معيار التكلفة المنخفضة. أما بالنسبة لنظام الرؤية الحاسوبية، فتم تشغيله باستخدام جهاز كومبيوتر بمعالج Intel Core i7-3630QM وبتردد 2.4 غيغاهرتز مع 12 غيغابايت من الذاكرة العشوائية.
تم تنفيذ كافة التجارب ضمن ساحة في الحرم الجامعي لجامعة حلب بمساحة تبلغ 7500 متر مربع، وبطول 100 متر وعرض 75 متر. وبسبب المساحة المحدودة لساحة التجارب، سارت السيارة بسرعة أقصاها 15 كم/سا في وضع القيادة الذاتية، كما تم تنفيذ عملية معايرة لنظام الرؤية الحاسوبية في بداية كل تجربة من أجل التأقلم مع ظروف الإضاءة وتصحيح أي شذوذ ناتج عن الظروف الجوية.
يتوفر فيديو لتجارب النظام المقترح في [16].
1.7. تجربة نظام التوجيه
بالاعتماد على الطريقة المقترحة في القسم 4.2، تمكن نظام الرؤية الحاسوبية من التعرف على الخط المنصف وحساب مقدار خطأ الانزياح عن الخط المنصف من التغذية المباشرة للكاميرا خلال التجارب التي تمت في الساحة، يمكن رؤية هذه البيانات في الشكل 20.
من خلال تطبيق خوارزمية تحكم باستخدام الحلقة المغلقة (الموضحة في القسم 4.4) تم الوصول للنتائج في الشكل 21 والتي توضح تغيرات خطأ الانزياح عن المنصف خلال التجربة العملية.
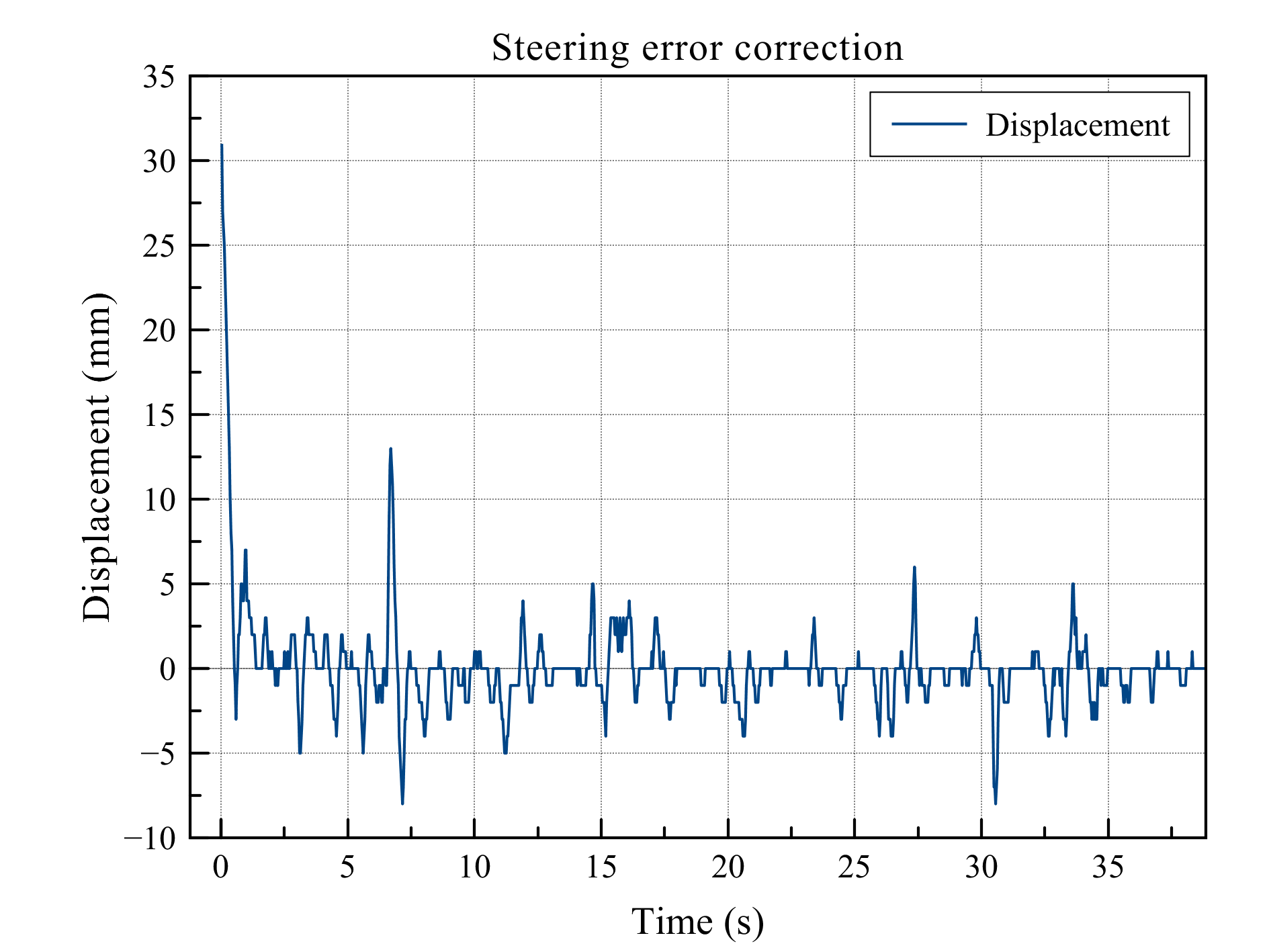
يوضح الشكل 21 مقدرة نظام قيادة وتوجيه السيارة على اتباع الخط المنصف للطريق عبر تصغير معدل الخطأ، لكن من الملاحظ أن التأرجح الكبير نسبياً الحاصل أثناء عمل النظام يعني إمكانية استخدام خوارزميات تحكم أكثر تقدماً، وذلك من أجل الوصول لانسيابية أفضل أثناء اتباع الخط المنصف.
2.7. تجربة نظام المكابح وتجنب العوائق
إن نظام الأمواج فوق الصوتية المستخدم لديه المقدرة على التقاط العوائق في الظروف الخارجية حتى مسافة 3.5 متر، وهذا يعتبر مقبولاً لظروف التجربة الحالية (السرعة 15 كم/سا في ساحة ذات أبعاد 100×75 متر)، بالطبع يمكن استخدام حساسات أكثر تقدماً في الأبحاث المستقبلية.
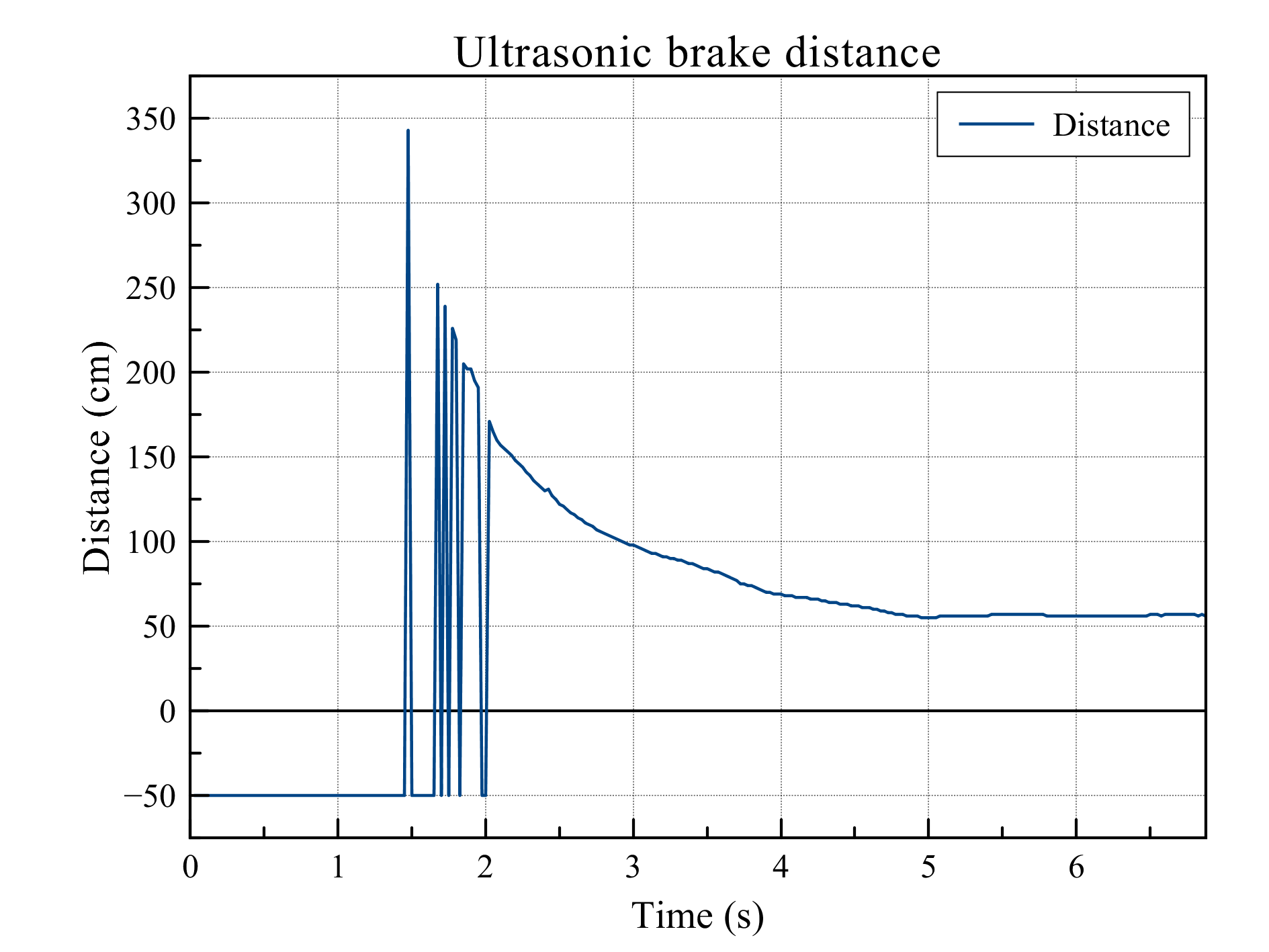
يلاحظ من الشكل 22 وجود انقطاعات أثناء عملية التعرف على العائق (بدءاً من الثانية 1.5 حتى 2) وهذا يعود لطبيعة الجسم البشري في هذه التجربة، لكن مايهم هو نجاح نظام تجنب الاصطدام بالعوائق وإعطاء أمر التوقف للمكابح فور اكتشاف العائق عند 1.5 ثانية ومسافة 3.4 متر والتوقف بشكل كامل قبل 0.6 متر من العائق.
بشكل عام، من الممكن حصول ظروف مفاجئة أخرى أثناء التجارب العملية كفشل في مصدر الطاقة أو فشل في العتاد والتجهيزات، ولهذا السبب تم أخذ عامل الأمان بعين الاعتبار في النظام المقترح من خلال النقاط التالية:
- يملك النظام مصدر طاقة احتياطي في حال حصول فشل في مصدر الطاقة.
- كافة الدارات المصممة ضمن النظام تم عزلها عبر استخدام العوازل الضوئية Photocouplers.
- في حال حصول فشل غير متوقع ضمن المنظومة، سيقوم نظام المكابح بإيقاف السيارة بشكل تلقائي.
كما سيتم إضافة عوامل أمان إضافية في الأعمال المستقبلية.
8. النتائج والأعمال المستقبلية
قدمت هذه الورقة البحثية نظاماً روبوتياً بسيطاً وعملياً لقيادة السيارات الحقيقية بأنواع مختلفة بدون الحاجة لأي تعديل عليها. أولاً؛ تم عمل نمذجة ومحاكاة لنظام التوجيه، تلا ذلك تطوير برمجية الرؤية الحاسوبية للتعرف على الخط المنصف للطريق، مما أعطى المقدرة للسيارة على تتبع مسار محدد بشكل ذاتي. ثانياً؛ تم تصميم وتنفيذ نظام الكبح التلقائي باستخدام التغذية الراجعة من حساسات الأمواج فوق الصوتية. ثالثاً؛ نجح النظام الالكتروني-الميكانيكي بقيادة السيارة بشكل فيزيائي عبر التحكم بكل من عجلة القيادة والمكابح ودواسة الوقود. تم اختبار النموذج الأولي للنظام المقترح في عدة اختبارات وبظروف عمل مختلفة، وأعطى نتائج تدل على موثوقية مقبولة. لكن وبسبب محدودية المساحة في الأرض المستخدمة للتجارب العملية في هذا البحث، تمت عمليات الاختبار بسرعات منخفضة نسبياً ولم تسنح الفرصة لاختبار النظام المقترح بسرعات عالية. يقوم الفريق حالياً بالعمل على اختبار النظام في طرق المدينة الحقيقية وبسرعات أعلى، وكذلك يهدف لتطوير نسخة عملية وأصغر حجماً من الروبوت المقترح لتوفير سهولة أكبر في استخدام هذا النظام في حلول متعددة في المستقبل.
9. كلمة شكر
نشكر كلاً من الزميلين لمشاركتهما في المشروع؛ محمد الكردي، هندسة الحواسيب، جامعة حلب. عبد الرحمن دوارة، هندسة الحواسيب، جامعة حلب.
10. المراجع
[1] Google. 2017. Waymo: Google self-driving car project, Available from:https://waymo.com Accessed: 2017-2-10
[2] Tesla. 2017. Model 3, Available from:https://www.tesla.com/model3 Accessed: 2017-2-10
[3] European Automobile Manufacturers Association (ACEA). 2017. Average Vehicle Age, Available from: http://www.acea.be/statistics/tag/category/average-vehicle-age Accessed: 2017-2-10
[4] Hasunuma, H., Nakashima, K., Kobayashi, M., Mifune, F., Yanagihara, Y., Ueno, T., Ohya, K. and Yokoi, K., 2003. A tele-operated humanoid robot drives a backhoe. In Robotics and Automation, 2003. Proceedings. ICRA’03. IEEE International Conference on (Vol. 3, pp. 2998-3004). IEEE, Taiwan.
[5] Jen, F.H. and Mai, B.T., 2012, July. Building an autonomous line tracing car with PID algorithm. In Intelligent Control and Automation (WCICA), 2012 10th World Congress on (pp. 4478-4483). IEEE, China.
[6] Kairos Autonomi. 2017. Pronto 4 Robotic Applique Kit, Available from: http://www.kairosautonomi.com/pronto4-system-s4.php Accessed: 2017-2-10
[7] Molina, P., Echeverry, J., Vasquez, V. and Mendez, J., 2013. Low cost implementation of a remote controlled Suzuki car to assist physically challenged people. In Connected Vehicles and Expo (ICCVE), 2013 International Conference on (pp. 362-368). IEEE, USA.
[8] Namik, H., Inamura, T. and Stol, K., 2006. Development of a robotic driver for vehicle dynamometer testing. In Proceedings of 2006 Australasian Conference on Robotics and Automation. Auckland, New Zealand (pp. 1-9).
[9] Paolillo, A., Cherubini, A., Keith, F., Kheddar, A. and Vendittelli, M., 2014. Toward autonomous car driving by a humanoid robot: A sensor-based framework. In Humanoid Robots (Humanoids), 2014 14th IEEE-RAS International Conference on (pp. 451-456). IEEE, Spain.
[10] Rasmussen, C., Sohn, K., Wang, Q. and Oh, P., 2014. Perception and control strategies for driving utility vehicles with a humanoid robot. In Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on (pp. 973-980). IEEE, USA.
[11] Shoval, S., Zyburt, J.P. and Grimaudo, D.W., 1998, May. Robot driver for guidance of automatic durability road (ADR) test vehicles. In Robotics and Automation, 1998. Proceedings. 1998 IEEE International Conference on (Vol. 2, pp. 1767-1772). IEEE, Belgium.
[12] Stahle Robot Systems for cars. 2017. Autopilot System SAP2000 for cars, Available from: http://www.stahle.com Accessed: 2017-2-10
[13] Tsugawa, S., Yatabe, T., Hirose, T. and Matsumoto, S., 1979, August. An automobile with artificial intelligence. In Proceedings of the 6th international joint conference on Artificial intelligence-Volume 2 (pp. 893-895). Morgan Kaufmann Publishers Inc., Japan.
[15] V-USB. 2017. A Firmware-Only USB Driver for Atmel AVR Microcontrollers, Available from: https://www.obdev.at/vusb/ Accessed: 2017-2-10
[16] Video demonstration of the presented vehicle. 2017. Available from: https://youtu.be/w-2kUUZU_mo Accessed: 2017-2-10
[17] Yokoi, K., Nakashima, K., Kobayashi, M., Mihune, H., Hasunuma, H., Yanagihara, Y., Ueno, T., Gokyuu, T. and Endou, K., 2006. A tele-operated humanoid operator. The International Journal of Robotics Research, 25(5-6), pp.593-602.